Entwurf und Implementierung eines parametrisierten Whole-Body-Gestensets für humanoide Roboter zur dynamischen Feedback-Gestaltung
by Tamara Flemisch
Bachelor Thesis
June 17th, 2013 until September 9th, 2013
Sorry, this content is only available in German. For your convenience, it is shown below in this language.
Heutzutage spielen Roboter im Allgemeinen und speziell in humanoider Form im alltäglichen Leben der meisten Menschen noch kaum eine Rolle, was sich jedoch mit wachsenden Fortschritten und Erkenntnissen in der Forschung ändern könnte. Vor allem beim Einsatz von humanoiden Robotern steht die Kommunikation im Vordergrund, wodurch eine intuitive Interaktion von hoher Relevanz ist, die unter anderem durch die Verwendung von Gesten erreicht werden kann.
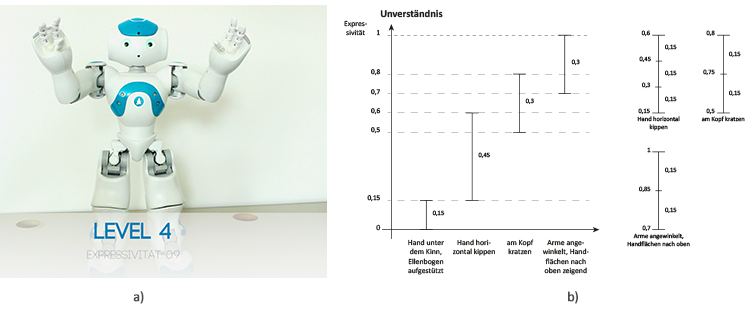
In dieser Bachelorarbeit wurde ein Konzept zur Steigerung der Expressivität einer Feedback-Art, wie z. B. Akzeptanz oder Abweisung entwickelt. Hierbei werden sowohl die Steigerung der Geste durch Parameter, wie räumliche und zeitliche Ausdehnung der Geste, als auch die Steigerung durch Verwendung verschiedener Gesten zur Erzeugung des Ausdrucks verwendet (b). Dieses Gestenset, das durch die Expressivität als Parameter definiert wird, wurde prototypisch mit Hilfe des humanoiden Roboters Nao umgesetzt (a). Dieser erzeugt nach Eingabe einer gewünschten Feedback-Art und eines Expressivitätswerts eine passende Geste.
Diese Webseite nutzt lediglich ein technisch notwendiges Cookie zur Auswahl der angezeigten Sprache. This website uses only an operational cookie to store the display language.